





















Bộ Servo Leadshine điều khiển sử dụng bằng truyền thông RS485(Modbus RTU Protocol) hoặc Address bus+Triger. Chuyên dùng cho Robot đơn trục, máy CNC đa trục,… |
|
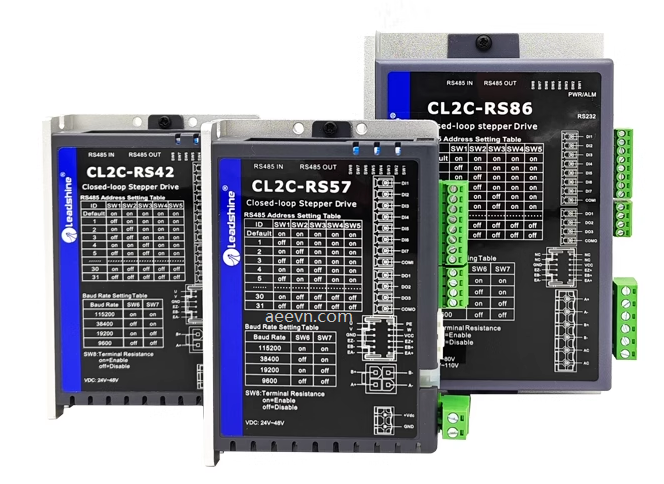
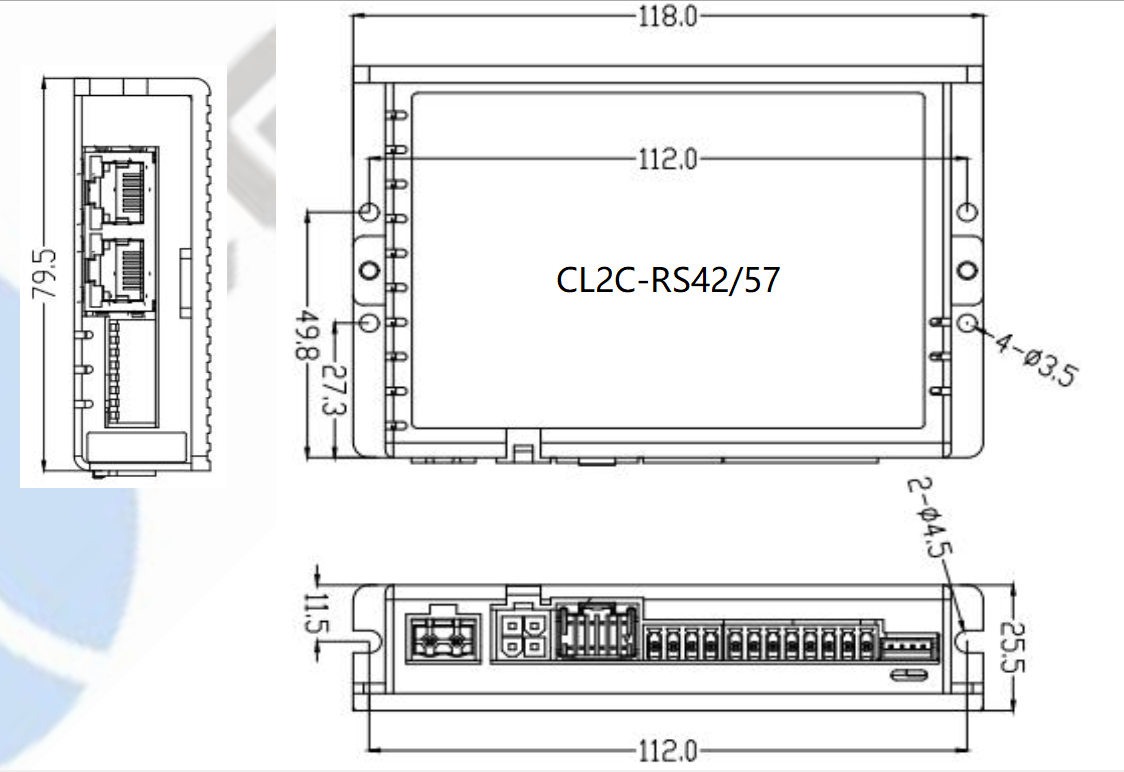
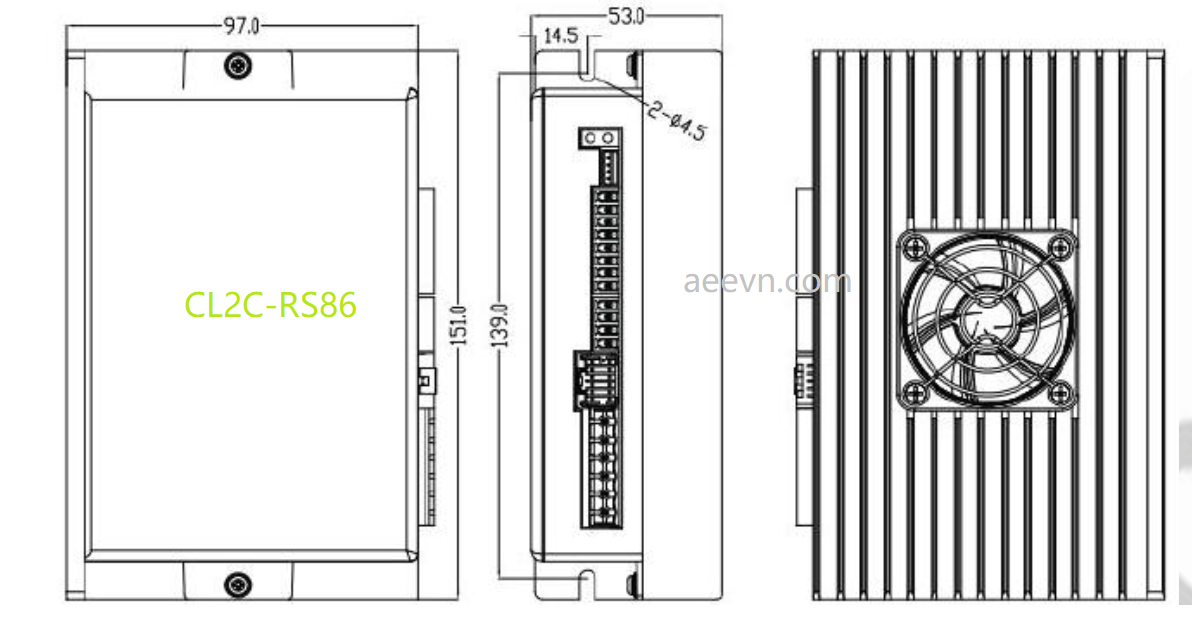
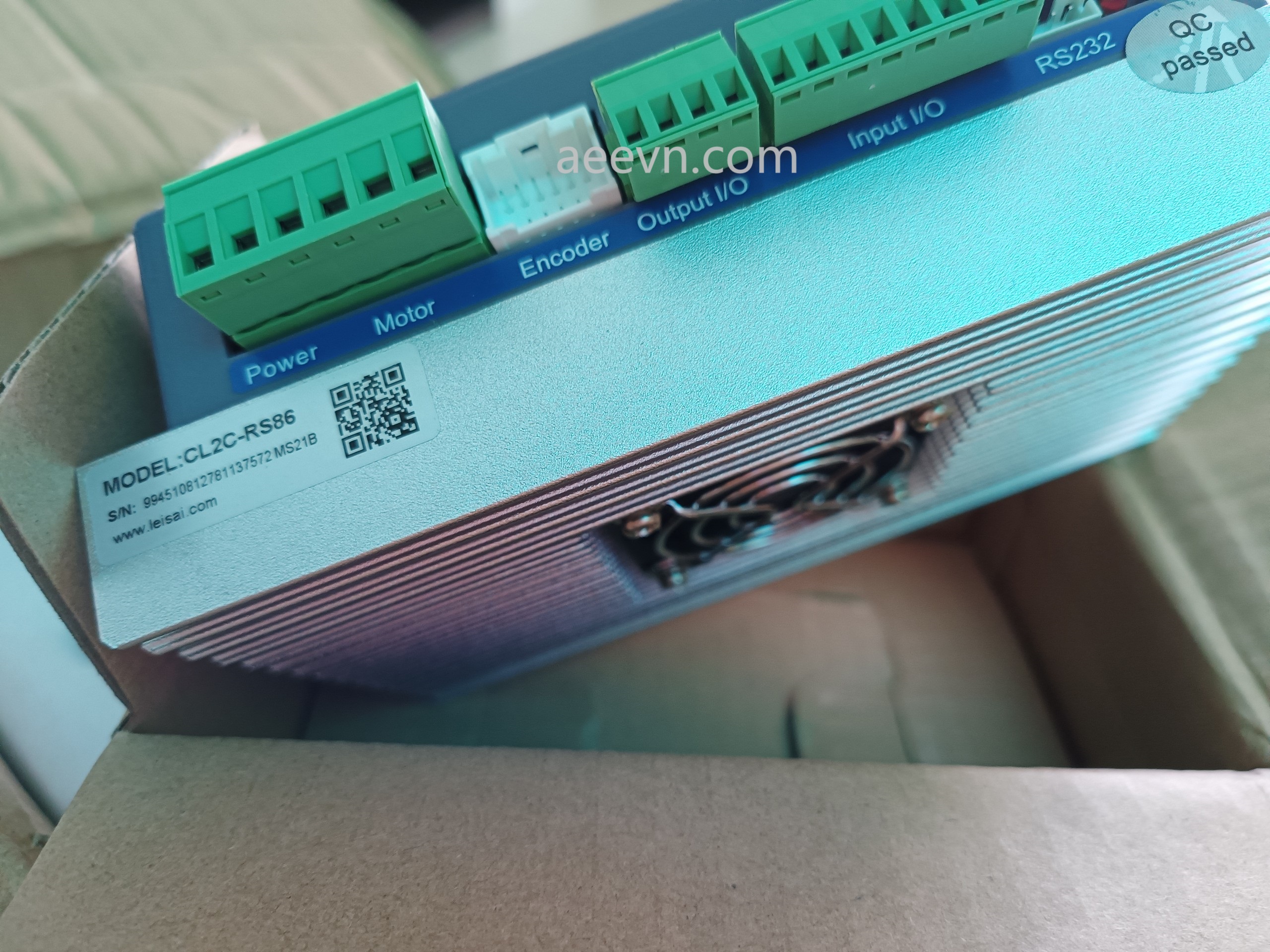
| Mã sản phẩm: | CL2C-RS42, CL2C-RS57, CL2C-RS86 |
| Xuất xứ: | Chính hãng |
| Thương hiệu: | Leadshine |
| Lượt xem: | 1.554 |
| Trạng thái: | Còn hàng |
Liên hệ |
|
| Liên hệ | |
*Giới thiệu:
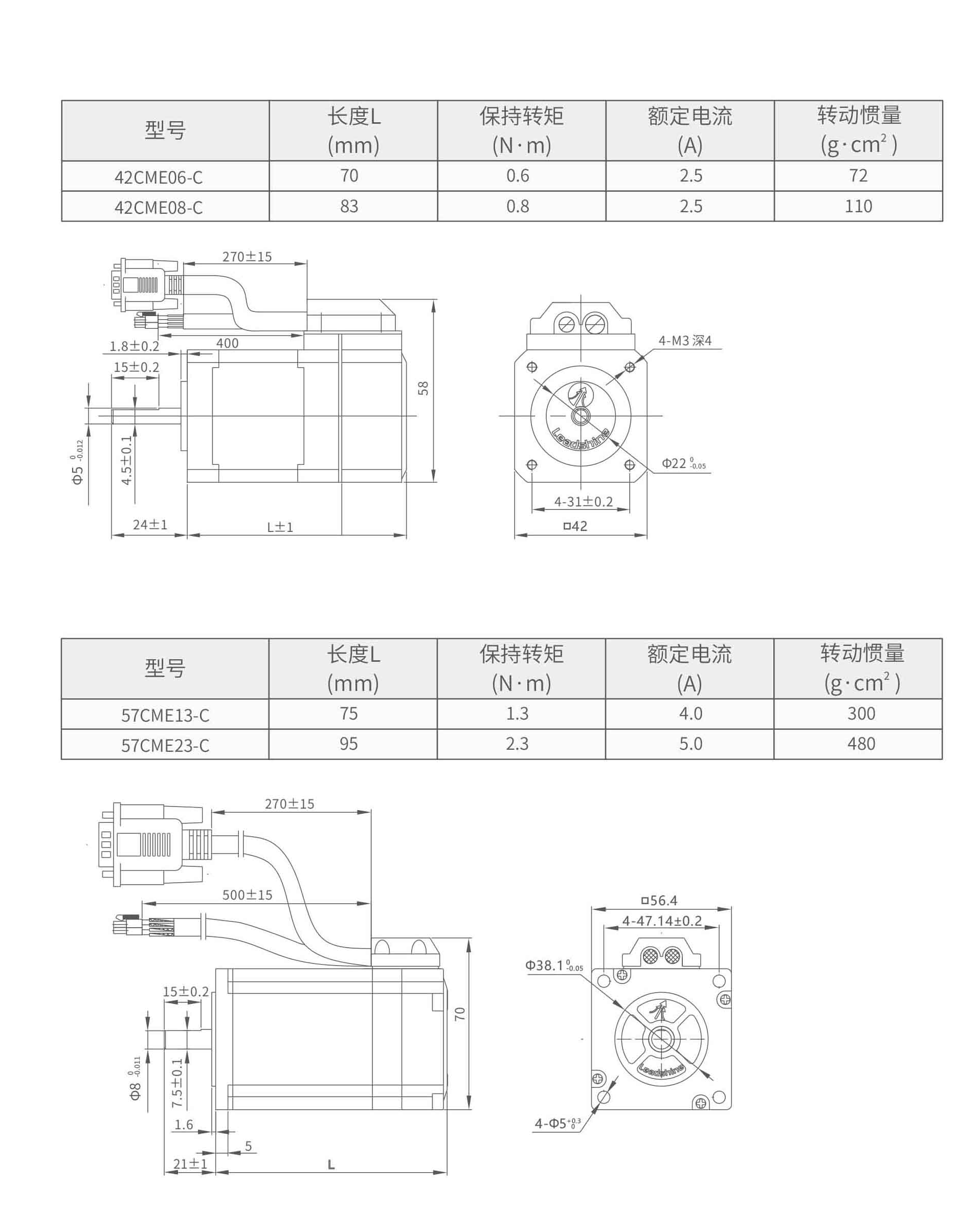
-CL2C-RS42, CL2C-RS57, CL2C-RS86 là bộ 3 sản phẩm mới của hãng Leadshine dùng với các động cơ Servo size 42,57,86 như 42CME06-C, 57CME13-C, 57CME23-C, 86CME80-C,…
=>Chuyên dùng cho điều khiển Single Axis Robot/ Multi axis robot,…
Dùng thay thế cho các Driver của Ezi, IAI,SMC,… cải thiện được các nhược điểm: Giá thành cao, Ezi chạy kêu to và nhanh hỏng, hiếm hàng, thời gian order hàng lâu.
Ví dụ như CL2C-RS57 dùng thay thế cho Ezi Driver EzS-NDR-56M-A-D/EzS-NDR-56L-A-D/EzS-NDR-60L-A-D,… CL2C-RS42 dùng thay thế cho Ezi Driver EzS-NDR-42M-A-D/EzS-NDR-42L-A-D,…
=>Chức năng hoàn toàn giống nhau(Chạy theo kiểu Adress bus+Triger hoặc Truyền thông). Các Driver chạy xung như EzS-PL/PO-56L-A-D chẳng hạn thì ta dùng Driver CL42C/CL57C/CL86C,…
*Lưu ý: Khi thay Driver Leadshine thì tức nhiên cần phải thay cả động cơ Servo của Leadshine. Không thể dùng Driver Leadshine với động cơ Ezi được, chúng khác chuẩn đấu dây và Encoder. Tuy nhiên khi chúng ta thay nguyên bộ bao gồm cả Driver+Motor Leadshine thì giá thành vẫn còn rẻ hơn nhiều khi mua riêng Driver hoặc Motor của Ezi. Giá thành của Leadshine chỉ chưa tới 1/3 giá của Ezi nhưng chất lượng lại hơn hẳn Ezi về nhiều mặt và dùng rất là bền bỉ. =>Do đó nên tôi khuyên các khách hàng đang còn sử dụng Servo Ezi khi bị hư hỏng nên chuyển qua nguyên Set Servo của Leadshine để sử dụng để đạt hiểu quả kinh tế hơn và có nhiều thuận lợi hơn sau này. Quý khách có thể mua một bộ Servo Leadshine về dùng thử để test hiệu năng!
*Ưu điểm khi dùng bộ Leadshine Servo này với Robocylinder:
-Dừng siêu chính xác đến 0.001mm, chạy cực nhanh 300-800mm/sec tùy vào Screw lead của Robot, Momen xoắn lớn ở tốc độ cao mà không cần phải dùng điện áp nguồn cao. Dừng nhanh dứt khoát trong thời gian cực ngắn mà không bị dao động rung lắc Rotor động cơ như các AC Servo Driver =>Hoàn toàn phù hợp cho Robocylinder.
-Thiết kế nhỏ gọn nhưng lại có công suất lớn, momen xoắn cao, chạy rất nhanh và mạnh, có chức năng bảo toàn momen rất thông minh khi tải thay đổi nhiều mà không bị giật như các driver khác. Nếu các bạn đã dùng nhiều loại servo driver thì dùng bộ này là sẽ thích ngay!
-Chức năng truyền thông nối tiếp rất tiện dụng để kết nối thành mạng điều khiển dùng PLC.
-Dễ dàng điều khiển với phương pháp dùng Bus địa chỉ 4 bit+xung Triger Hoặc chạy truyền thông mạng giao tiếp. Tất cả đều điều khiển giám sát động cơ một cách dễ dàng khi chúng ta sử dụng với PLC, VXL.
-Rất thuận tiện để sử dụng vào các Single Axis Robot, máy CNC, các cơ cấu tự động hóa,…
-Đây là loại Servo tốc độ cao, có độ phân giải cao, chạy siêu chính xác vị trí, đặc biệt hơn là dòng này có hỗ trợ chức năng điều khiển bằng truyền thông RS485 với giao thức Modbus RTU rất là tiện lợi như sau:
-Thứ nhất là chúng ta không cần dùng PLC mà là PLC có phát xung tốc độ cao để phát xung cho Driver một cách liên tục và chạy được nhanh với độ phân giải cao nữa, nếu PLC có tốc độ phát xung thấp <50khz thì độ phân giải vi bước sẽ kém, cụ thể là các tọa độ dừng sẽ không thể đạt được đến độ chính xác hàng 0.001mm. Nên các tọa độ dừng của động cơ sẽ không có độ chính xác cao cho các ứng dụng máy móc cần vị trí có độ chính xác cao nữa.
-Thứ hai là chúng ta không bị giới hạn bởi việc chọn PLC có hỗ trợ phát xung nhiều cổng tốc độ cao chuyên dụng để điều khiển nhiều trục cùng 1 lúc nữa. Ví dụ Delta PLC DVP28SV11T2 là PLC chuyên phát xung 4 trục tốc độ cao tới 200khz cho máy CNC 4 trục X,Y,Z,A. Nhưng khi chúng ta có hơn 4 trục thì lại là khó rồi. Việc dùng phương pháp truyền thông có ưu điểm là mở rộng được đến gần 32 trục, chỉ cần dùng 1 PLC bình thường rẻ tiền miễn là có cổng truyền thông RS485/ giao thức Modbus RTU như PLC Delta(DVP14SS211T,…), Mitsubishi PLC,.. là được.
-Thứ ba là chúng ta có thể không cần sử dụng PLC, chỉ cần dùng màn hình HMI nhập các điểm sẵn trên đó và truyền trực tiếp đến các Driver CL2C này mà chạy thôi, hoặc dùng cáp kết nối với máy tính là cũng tự chạy được theo ý muốn rồi, có thể dùng phần mềm riêng trên máy tính để điều khiển một hệ Servo nhiều trục này.
-Thứ tư là dùng truyền thông thì chỉ nhìn thấy các đường dây mạng RJ45 kết nối mắc nối tiếp giữa các Driver cho các trục thôi chứ k còn nhìn thấy rất nhiều dây phát xung, dây điều khiển gì rắc rối lằng ngoằng nữa. Tất cả đều chạy theo lệnh gửi tư PLC hay HMI đến mà thôi.
-Cuối cùng là loại Servo này sử dụng điện áp DC24-48V nên có thể sử dụng được động cơ trong môi trường có thể ẩm ướt một tí cũng không bị rò rỉ dòng điện từ cuộn dây ra thân động cơ làm nguy hiểm đến tính mạng con người khi sờ vào các chi tiết kim loại trên máy như các động cơ động cơ AC220V.
*Ghi chú:
-Quý khách cần các tài liệu về điều khiển truyền thông RS485/Modbus RTU cho Driver hoặc các tài liệu khác như Driver User manual, Driver Software, Motor Specification,… thì hãy lh vơi chúng tôi. Vì dữ liệu là khá lớn không thể đăng tải tại đây được.
-Motor tương thích với các Driver như sau:
CL2C-RS42: 42CME03-C, 42CME06-C, 57CME08-C,…
CL2C-RS57: 57CME13-C, 57CME23-C, 57CME23-C, 57CME26-C,…
CL2C-RS86: 86CME35-C, 86CME45-C, 86CME80-C, 86CME120-C,…
-PC Software: Motion Studio Ver1.4.7 Beta Version
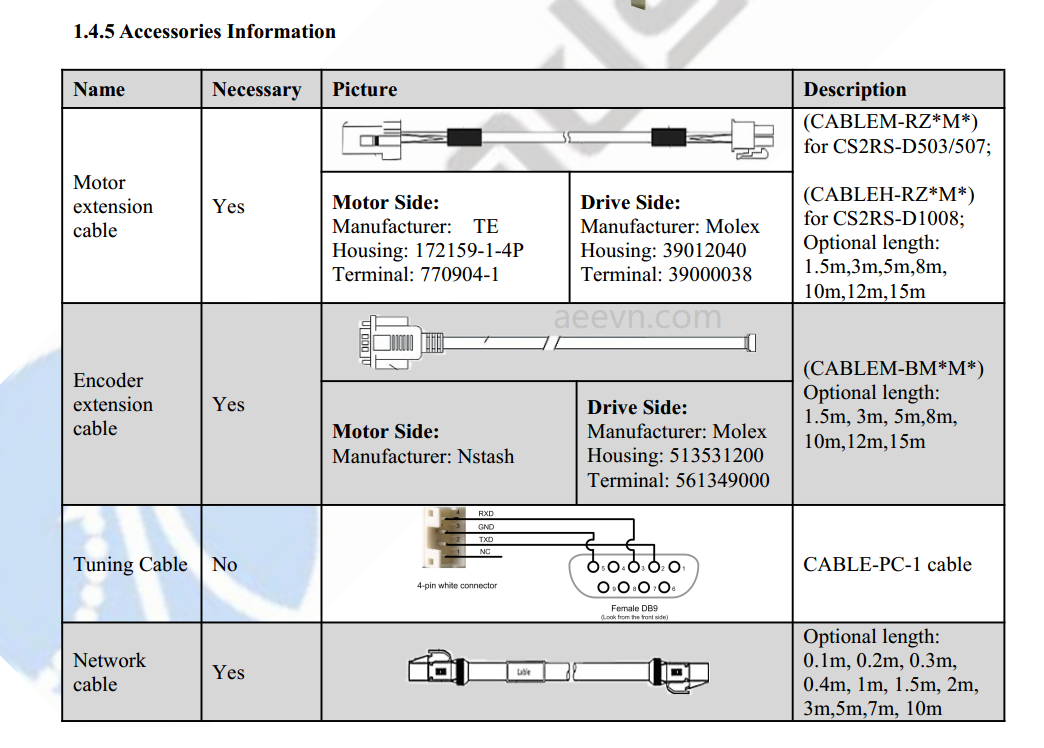
-Cable Debug (kết nối máy tính với Software): CABLE-PC-1
*Sau đây là hình ảnh của các Driver:






Tài liệu hướng dẫn tại đây:























Không có bình luận