





















Bộ Servo 86 chính hãng Leadshine, sử dụng phương pháp điều khiển phát xung Pulse/Direction |
|
| Mã sản phẩm: | 86CME35+CL86C, 86CME45+CL86C, 86CME80+CL86C, 86CME85+CL86C, 86CME120+CL86C |
| Xuất xứ: | Chính hãng |
| Thương hiệu: | Leadshine |
| Lượt xem: | 2.524 |
| Trạng thái: | Còn hàng |
Giá liên hệ |
|
| Liên hệ | |
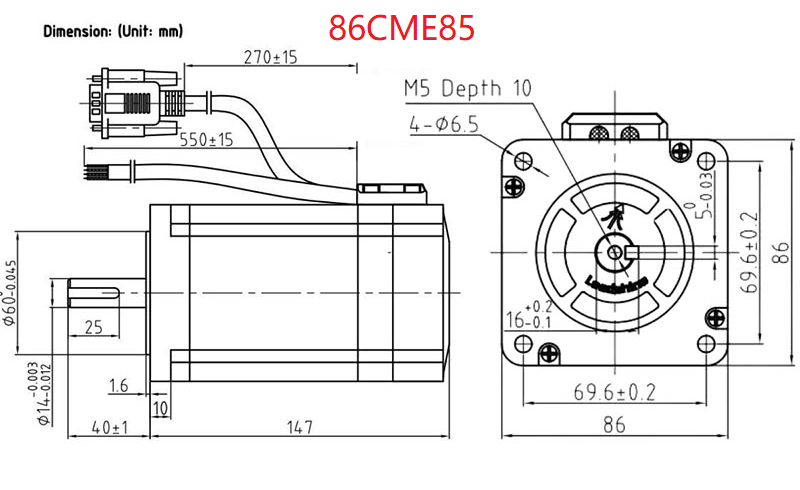
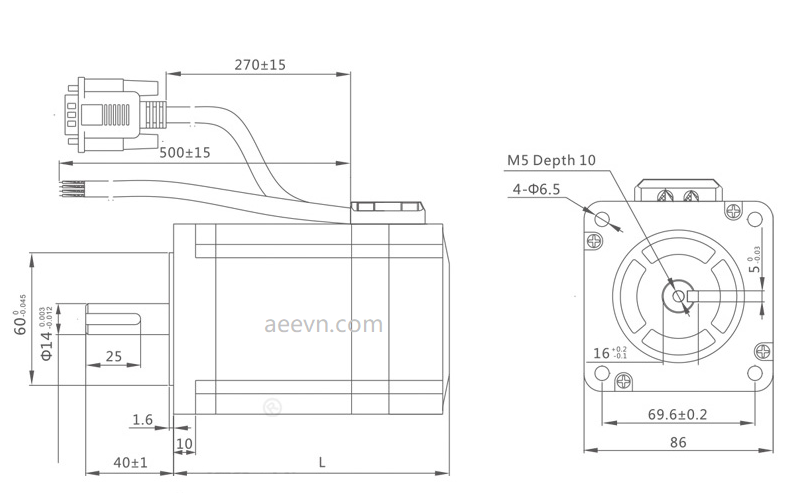
-Bộ Servo driver chính hãng Leadshine bao gồm Driver CL86/CL86C + Motor 86CME85-C có tốc độ cao (2500RPM), hoạt động chính xác tuyệt đối và tin cậy, độ bền cao, momen giữ trục lớn, hãm dừng chính xác không bị rung lắc dao động như các dòng AC Servo khác, dễ dàng điều khiển sử dụng chỉ với 2 tín hiệu điều khiển Xung/ chiều (Pulse/ Direction) hoặc xung/xung (CW/CCW) . Dòng này nhanh và rất chính xác vị trí, momen mạnh hơn nhiều so với loại Step motor cùng kích cỡ.
-Bộ Step Servo này chuyên dùng trong tự động hóa công nghiệp và cho các máy CNC, các ứng dụng cần kích thước motor gọn nhẹ nhưng chạy tốc độ cao, momen xoắn lớn ở tốc độ cao và dừng chính xác tuyệt đối, chạy fulltime 24/24h không lo bị sai vị trí.
***Lưu ý:
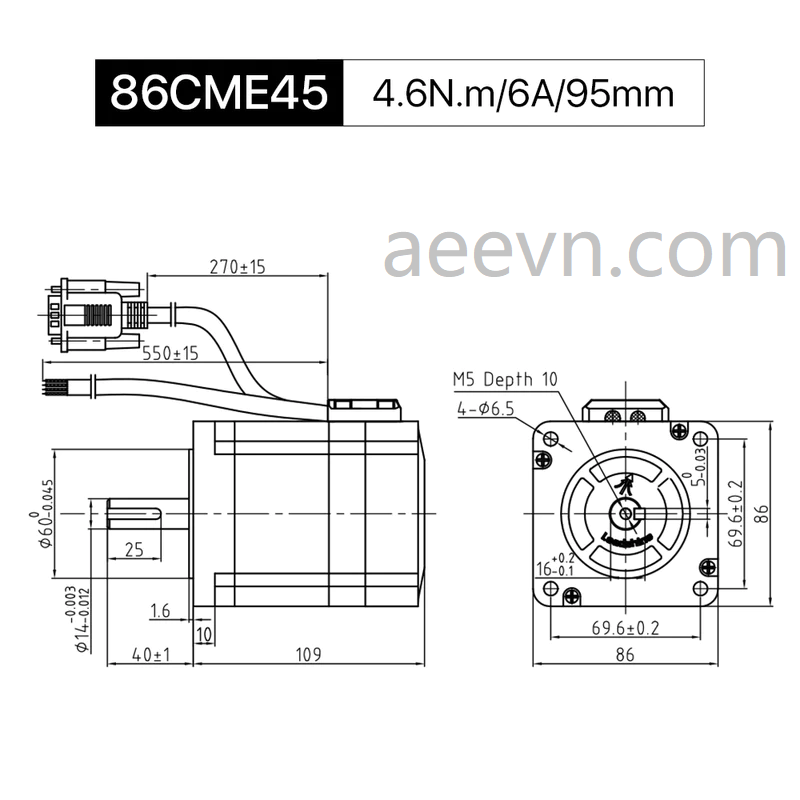
-Motor có mã đuôi -C với ý nghĩa là -Cable: Motor có tích jack cắm cáp động cơ giống kiểu như các AC Servo motor. Loại -C chúng ta dễ dàng kết nối 1 cáp motor CABLEM-RZ3M0 để kết nối với Driver CL86C mà không cần phải tự chế dây cáp cho động cơ hàn trực tiếp mất thẩm mỹ, bất tiện và dùng không bền như cáp chuyên dụng cho motor do hãng SX. Vì cáp động cơ yêu cầu cần có độ mềm mại dễ uốn và độ đàn hồi cao, tháo lắp dễ dàng.
-Nếu quý khách muốn chuyển sang điều khiển bằng phương pháp chạy truyền thông mạng thì chỉ cần đổi sang Driver CL2C-RS86 và đổi cáp Encoder sang mã CABLEM-BM3M0.
-Hàng luôn sẵn kho với SL lớn, đáp ứng yêu cầu cấp bách cho quý khách thay thế sửa chữa và thiết kế mới máy móc.
-Thông số cơ bản của sản phẩm:
Điện áp sử dụng: 24-80VDC
Tần số xung điều khiển tối đa : 200Khz.
Độ phân giải encoder: 1000PPR (1000 xung/ vòng).
Momen xoắn động cơ: 4.5Nm.
Dòng điện tối đa của động cơ 6.0A
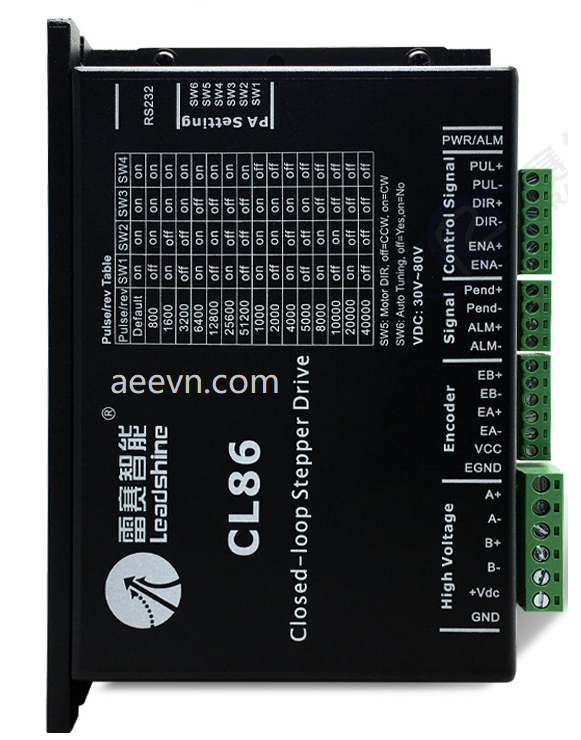
-Ghi chú: Driver CL86C khác Driver CL86 ở chỗ nó có thêm công tắc gạt chọn chế độ xung điều khiển 5V hoặc 24V, điều này giúp ta có thể xài xung điều khiển 24V trực tiếp (Ví dụ như xung ra của PLC) mà không cần phải gắn thêm điện trở hạn dòng 1K-0.5W ở chân tín hiệu điều khiển Xung/Chiều trên Driver.
-Cable Debug (Kết nối với PC): CABLE-PC
-Encoder extension cable: CABLEH-BM3M0, CABLEH-BM5M0,…
-Motor extension cable: CABLEM-RZ3M0, CABLEM-RZ5M0,…
-Sofware kết nối với PC để chỉnh thông số Driver: Motion Studio Ver1.3.10 Alpha Version









Thông số kỹ thuật:
Leadshine drivably supporting the mixing stand servo motor 86
input voltage range: 24 ~ 80 VDC
maximum peak current:. 6.0A
subdivided range: 200 ~ 51200ppr
signal input: differential / single-ended pulse / direction of
optical isolation input, anti Interference ability of the
pulse response frequency: 200KHz
serial communication function, current, subdivision can be adjusted, signal edge, alarm output logic and otherfunctions adjustable power parameters automatically
set the function of
closed-loop vector control to ensure that the motor high-speed large torque output, while ensuring The motor does not lose step
change current control, the motor heating greatly reduce the
ultra-low vibration noise
with over-voltage, over-current, tracking error tolerance and other protection function
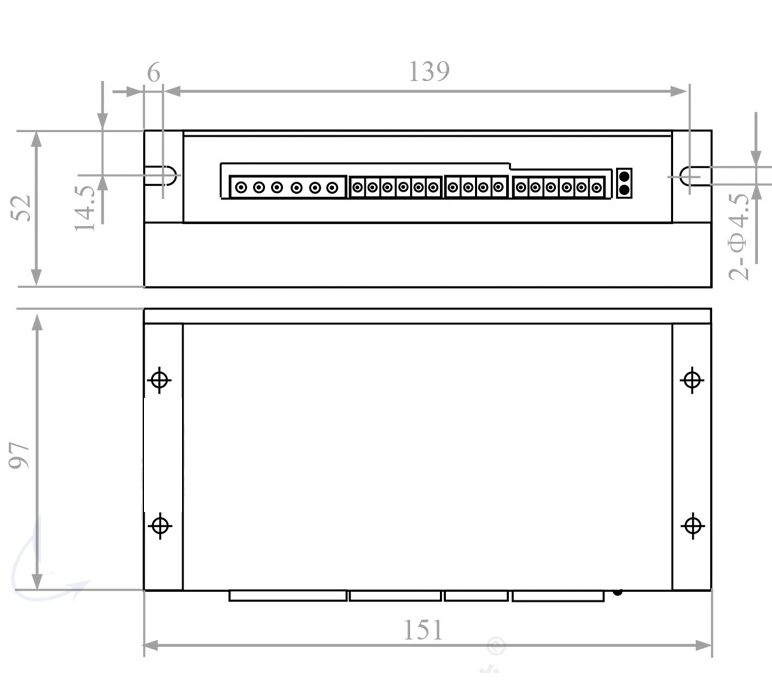
Small size, saving installation space
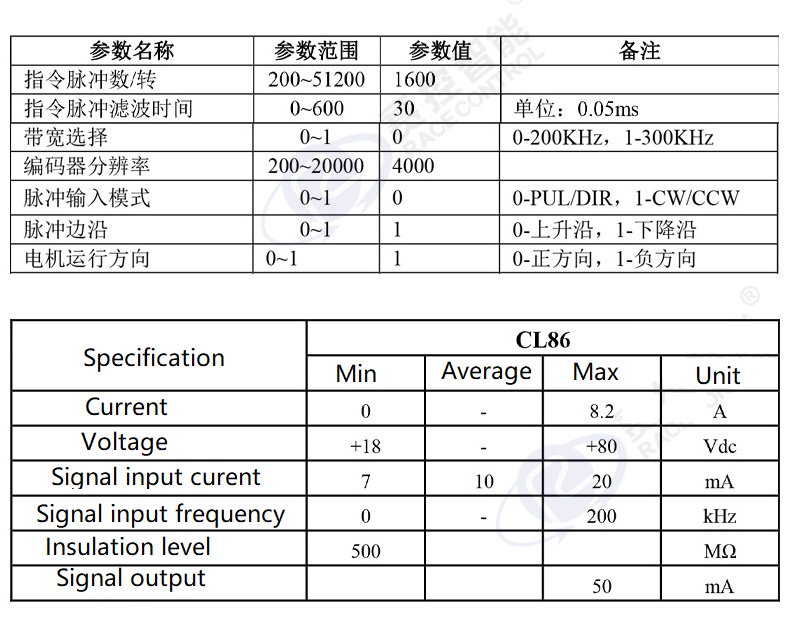
1. Electrical indicators
| parameter | CL86 | |||
| Minimum value | Typical value | The maximum value | unit | |
| Maximum peak current | 0 | 6 | 8.2 | A |
| Input the supply voltage | 24 | 48 | 80 | Vdc |
| Logic input current | 7 | 10 | 20 | mA |
| Pulse frequency | – | 200 | – | KHz |
| Insulation resistance | 500 | MΩ | ||
2. Interface definition
1) motor and power input port
| Terminal number | symbol | name | Description |
| 1 | A+ | Motor phase A+ winding | |
| 2 | A- | Motor phase A- winding | |
| 3 | B+ | Motor phase B+ winding | |
| 4 | B- | Motor phase B- winding | |
| 5 | GND-Vdc | Input DC power supply | 24-80VDC |
2) Encoder signal input port
CL86 encoder signal interface, the pin is defined as follows:
| DB terminal number | symbol | name | Description |
| 1 | EA + | Motor encoder A phase input | |
| 2 | EB + | Motor encoder B phase positive input | |
| 3 | GND | Encoder power ground | 0V |
| 11 | EA- | Motor encoder A phase negative input | |
| 12 | EB- | Motor encoder B phase negative input | |
| 13 | VCC | Encoder power supply | + 5V |
3) control signal port
| name | Description |
| PUL + | Pulse input signal:
Pulse effective edge adjustable, the default pulse rising edge is valid; in order to reliably respond to the pulse signal, the pulse width should be greater than 1.2μs. If the use of +12 V or +24 V need to add an resistor (1K Ohm for 12V input signal, 2K Ohm for 24V input signal). |
| PUL- | |
| DIR + | Direction input signal:
High / low signal, in order to ensure reliable reversing of the motor, the direction of the signal should be preceded by the pulse signal at least 5μs established. If the use of +12 V or +24 V need to series resistance. |
| DIR- | |
| ENA + | Enables the control signal, which is used to enable or disable the drive output. When the ENA is low (or internal optocoupler), the driver will cut off the current of each phase of the motor so that the motor is in a free state and does not respond to the input signal pulse.
When this function is not required, the enable signal can be left floating. If the use of +12 V or +24 V need to series resistance. |
| ENA- | |
| ALM + | Fault signal output, open circuit for the open form.
The fault output logic can be set via the PC software. |
| ALM- |
4. Use the environment and parameters
| cooling method | Natural cooling or forced air cooling | |
| Use the environment | occasion | Can not be placed on other heating equipment, to avoid dust, oil, corrosive gases, humidity and strong vibration places, prohibit combustible gases and conductive dust; |
| temperature | 0 – + 50 ° C | |
| humidity | 40-90% RH | |
| vibration | 10 to 55 Hz / 0.15 mm | |
| Save the temperature | -20 ° C to 65 ° C | |
| weight | 0.28kg | |















Không có bình luận